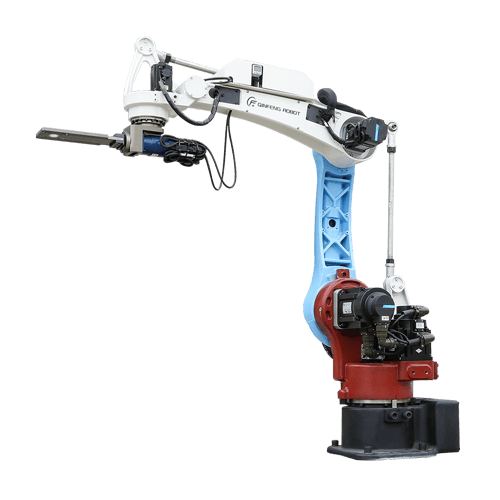
1.4M 四/五轴关节机械手(一体机)
QF-GJ-J-YT-1400-10-4/5
- 臂展1400mm,负荷10KG,采用自主研发的机器人控制算法,实现各轴联动控制,针对冲压行业送料特点,自动生成最优运动轨迹,动作平稳高效,效率可达15次/分钟;
- 灵活度高,可全方位、多角度的实现各种冲压动作:翻转、打废料(放料前)、侧挂、斜放或堆放等,并适用于连续模、单机多模等模具工艺
- 各轴全部采用高性能绝对伺服系统,线路优化,整体性能卓越,同时具备断电位置记忆功能避免原点复位困扰;
- 采用开放式可编程技术,支持运动轨迹编辑,操作简单,控制灵活,可存储多种产品信息,互换性强,一次设定即可长期使用;
- 适配于市面上所有类型的冲压设备:齿轮冲床、气动冲床、油压机,并做到无论吨位大小、机台高低,都可随意连接,实现设备的自由组合联线;
- 采用国内外著名品牌及高精度核心配件,品质稳定可靠,定位误差控制在+0.1mm,故障率低于1‰,使用寿命达8~10年 (视生产环境及保养情况而定);
- 产品已高度标准化,只须定制抓手(吸盘式、气动式、磁吸式等),安装便捷,交付三天即可量产。
全国服务热线:
400-166-2658
电子邮箱:sales@qinfeng-gp.com
官方网站:robot.qinfeng-gp.com
| 型号 | QF-GJ-J-YT-1400-10-4/5 | |
| 参数 | 单位 | 指标 |
| 电源电压 | V | 3相5线AC380 50/60HZ |
| 装机功率 | KW | 4 |
| 工作环境温度 | ℃ | -20~45 |
| 工作环境相对湿度 | % | 20-80 |
| 最大工作半径 | mm | 1400 |
| 最小工作半径 | mm | 350 |
| 最大重复精度 | mm | ±0.1 |
| 抓取尺寸 | mm | ≤800×800 |
| 各关节运动最大范围 | ° | J1 ±160 |
| ° | J2 -25,+75 | |
| ° | J3 -75,+75 | |
| ° | J4 ±300 | |
| ° | J5 ±180(四轴无此项) | |
| 各关节运动最大速度 | °/S | J1 143.9 |
| °/S | J2 141.3 | |
| °/S | J3 248.9 | |
| °/S | J4 438.7 | |
| °/S | J5 877.5(四轴无此项) | |
| 抓取重量 | kg | ≤10 |
| 生产效率(视产品大小) | pcs/min | 15 |
| 机身尺寸(L*W*H) | mm | 1220*600*1800(参数H为变量) |
| 机器人重量 | KG | ≈230 |