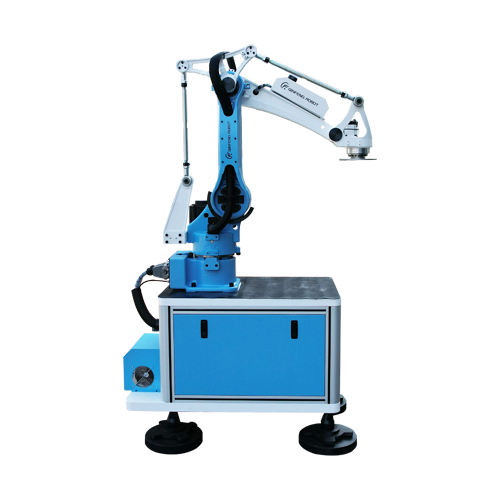
QF-GJ-J-YT-1400-10-4/5
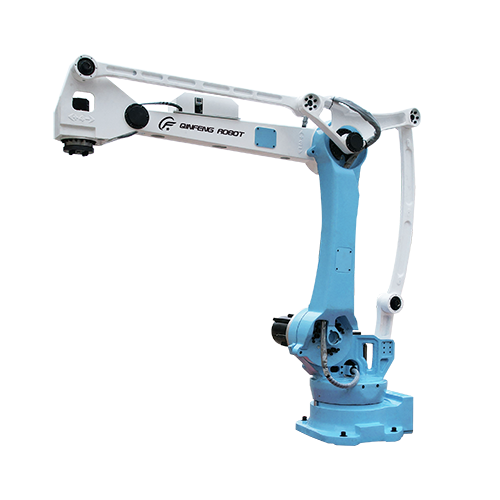
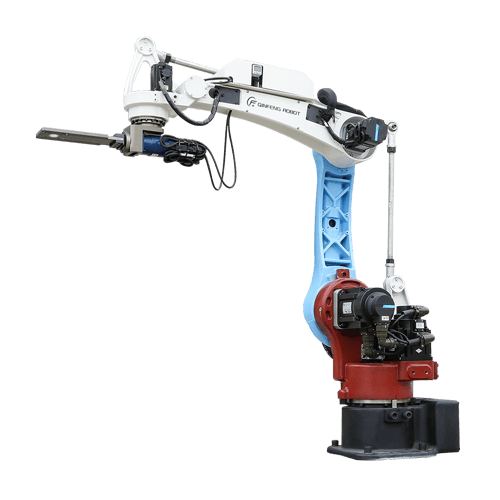
1.4M Joint stamping robot
- Compact design effectively saves on-site space.
- High quality domestic key motion components with stable and reliable operation.
Service Hotline:
400-166-2658
Email:sales@qinfeng-gp.com
Website:robot.qinfeng-gp.com
| Model | QF-GJ-J-YT-1400-6-4/5 | ||
| Parameter | Unit | Index | |
| Maximum working radius | mm | 1400 | |
| Minimum working radius | mm | 350 | |
| Grip size | mm | ≤800╳800 | |
| Centre grip weight | kg | ≤10 | |
| Maximum SPM | pcs/min | 15 | |
| Positioning precision | mm | ±0.1 | |
| Body size (H is variable) (L*W*H) | mm | 1220╳600╳1800 | |
| Body weight | kg | ≈230 | |
Motion range (Maximum speed) | J1 | ° (°/s) | ±160 (143.9) |
J2 | ° (°/s) | -25, +75 (141.3) | |
J3 | ° (°/s) | -75, +75 (248.9) | |
J4 | ° (°/s) | ±300 (438.7) | |
J5 (N/A for 4 axes model) | ° (°/s) | ±180 (877.5) | |