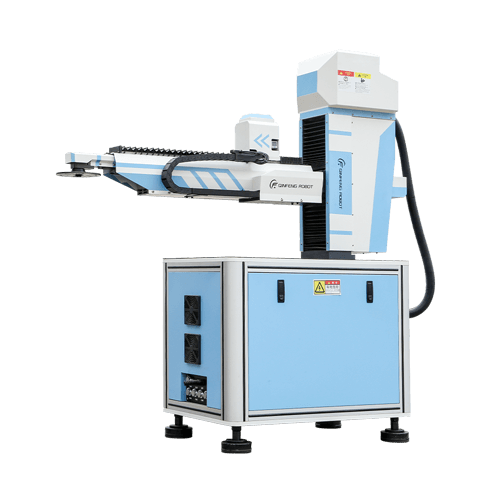
QF-BB-Z-MD-4000-20-4/5
20KG Swing arm stamping manipulator
- High-strength robotic arm structure design.
- Heavy-duty gripping capacity.
- Swing arm types are equipped with an independent air source, no interference with the on-site air source, and enhance the operation stability of the robotic arm.
Service Hotline:
400-166-2658
Email:sales@qinfeng-gp.com
Website:robot.qinfeng-gp.com
| Model | QF-BB-Z-MD-4000-20-4/5 | ||
| Parameter | Unit | Index | |
| Maximum working radius | mm | 4000 | |
| Minimum working radius | mm | 1750 | |
| Grip size | mm | ≤1500╳1500 | |
| Centre grip weight | kg | ≤20 | |
| Maximum SPM | pcs/min | 8 | |
| Positioning precision | mm | ±0.2 | |
| Body size (H is variable) (L*W*H) | mm | 2700╳1450╳2500 | |
| Body weight | kg | ≈2200 | |
| Axial travel stroke | Arm swing angle | ° | ±170 |
Arm vertical telescopic stroke (Min grip level) | mm | 0~430 (1200) | |
Arm horizental telescopic stroke | mm | 2250 | |
Arm turning angel (N/A for 4 axes model) | ° | ±180 | |
Suction disc rotating angle | ° | ±360 | |